Welcome to TriP’s documentation!
Have you ever worked with a robot with hydraulic actuators? Or ever have to compensate bad motors by having them moving the joint via a complicated linkage?
Then you have worked with a hybrid kinematic chain.
TriP is a python library designed to calculate the forward- and inverse-kinematics of such chains. Since hybrid chains are the most general type of rigid mechanism this includes almost all robots.
Features
Model any robot (including closed and hybrid chains)
Generate symbolic representations of forward kinematics
Compute Jacobian matrices for differential kinematics
Compute the inverse kinematics of arbitrary rigid mechanisms
Compute the Inverse Kinematics in position and/or orientation
Support arbitrary joint types and quaternions
Includes several ready to use examples (TriPed robot, Excavator Arm)
TriPs validates the inverse kinematics algorithms with extensive testing using analytic solutions.
How TriP models Robots
TriP models robots using the Robot class.
A robot object is made up of Transformation and KinematicGroup objects.
The KinematicGroup objects are used to model closed chains.
The following sections will explain the Transformation, KinematicGroup and Robot objects in more detail.
It is advised to read these sections before using them to model robots.
The last section also explains how Kinematic Solvers work.
Transformations
A Kinematic model is made up of Coordinate systems. These coordinate systems are connected by transformations.
TriP implements its own Transformation class.
One can distinguish between static transformations and dynamic transformations. Dynamic transformations change depending on an internal state thereby modeling the joints of a mechanism.
The Transformation class has an attribute that manages the internal state.
Transformation Descriptions
In general, states can influence the transformation in arbitrary ways. Yet robotics uses several standard conventions.
The Transormation class currently supports the following conventions:
translation with Euler angle rotation
translation with quaternion rotation
Translation with Euler Angles rotation
This convention is perhaps the most natural and intuitive. In this convention, the transformation is specified using 6 parameters [tx ty tz rx ry rz]. These parameters have the following interpretation:
parameter |
interpretation |
|---|---|
tx |
moves the coordinate system along the x-axis |
ty |
moves the coordinate system along the y-axis |
tz |
moves the coordinate system along the z-axis |
rx |
rotates the coordinate system around the x-axis |
ry |
rotates the coordinate system around the y-axis |
rz |
rotates the coordinate system around the z-axis |
Important
In this convention, rotation is always applied before translation.
The Euler angles follow the XYZ convention. This means that the transformation first rotates around x, then around y, and lastly around z. This convention is also called Roll, Pitch, and Yaw. Here rx=Roll, ry=Pitch, and rz=Yaw.
This transformation is captured by the following transformation matrix:
The definition of joints in this convention is very straightforward, below is a sample list of different joints:

Note that while all non specified parameters are assumed to be zero, the value of each state_variable still has to be supplied.
Translation with Quaternion rotation
Quaternions are an alternative four-dimensional description of rotation. They have many advantages compared to Euler angles, which are explained here . However, they trade these advantages for an intuitive interpretation.
parameter |
interpretation |
|---|---|
tx |
moves the coordinate system along the x-axis |
ty |
moves the coordinate system along the y-axis |
tz |
moves the coordinate system along the z-axis |
qw |
first quaternion, also called a. |
qx |
second quaternion, also called b. |
qy |
third quaternion, also called c. |
qz |
fourth quaternion, also called d. |
The corresponding matrix is:
Important
The matrix only describes a rotation if all quaternions are normalized, meaning \(qw^2+qx^2+qy^2+qz^2=1\). Since the current inverse kinematics solver does not support constraints this means that quaternions are not supported when calculating inverse kinematics.
Transformation trees
To fully specify the kinematic model of a robot not only the transformations are needed but also how they are connected. This is described by the so-called transformation tree. Conventionally nodes of this tree describe coordinate frames while its edges describe transformations. An example can be seen down below:

Here the cursive graph nodes are coordinate frames while the edges are the transformations between them. Since TriP only models transformations and not coordinate frames in TriP the name of a coordinate frame is synonymous with the name of the transformation leading to it. This leads to the following simplified transformation tree:

In this tree the edge and the node it leads to refer to the transformation. TriP builds this simplified transformation tree by specifying the parent of each transformation. The parent is in this case the transformation that preceded the current transformation. For the example transformation tree this would look like this:
to_joint_1 = Transformation(name="To Join1")
joint_1 = Transformation(name="Joint1",values={'ry': 0},state_variables=['ry'],parent=to_joint_1)
to_joint_2 = Transformation(name="To Joint2",values={'tx':1},parent=joint_1)
joint_2 = Transformation(name="Joint2",values={'ry': 0},state_variables=['ry'],parent=to_joint_2)
to_joint_3 = Transformation(name="To Joint3",values={'tx':1},parent=joint_2)
joint_3 = Transformation(name="Joint3",values={'ry': 0},state_variables=['ry'],parent=to_joint_3)
to_joint_4 = Transformation(name="To Joint4",values={'tx':1},parent=joint_1)
joint_4 = Transformation(name="Joint4",values={'ry': 0},state_variables=['ry'],parent=to_joint_4)
to_joint_5 = Transformation(name="To Joint5",values={'tx':1},parent=joint_4)
joint_5 = Transformation(name="Joint5",values={'ry': 0},state_variables=['ry'],parent=to_joint_5)
Important
Transformations with no parent are considered connected to the base Frame. Since for most robots, this is where they are connected to the floor this frame is also called Ground.
This can be seen in transformation `to_joint_1`. Note that strictly speaking this transformation is necessary since its transformation is an identity matrix.
It is only included for clarity.
The transformation tree building concept does not work if more than one transformation leads to the same frame. Here one would have to distinguish between the transformations leading to the frame and the frame itself. Such a situation is referred to as a closed kinematic chain, the next section will explain how they are modeled in TriP.
Kinematic Groups
Most kinematic libraries rely only on transformation objects because they only model open chains. An example for this is IKPY . In an open chain, the position and orientation of a coordinate system depend only on one transformation from its parent.
But, consider the excavator arm below:

In this example, multiple coordinate systems have more than one parent since the transformations form a loop.
Such a loop is called a closed kinematic chain.
Classically closed chains are modeled using an algebraic closure equation \(g(q) = 0\). The closure equation couples all joint states \(q\) so that multi transformations leading to the same frame all agree on the state of the frame.
In practice, this is computationally expensive and often entirely unnecessary.
Important
To simplify the system one could treat the system as if the hinges of the excavator’s arm were directly actuated.
This simplified virtual chain contains no closed loops and thus standard kinematics algorithms can be used to compute forward or inverse kinematics.
To get the solution of the real excavator, one simply has to convert between the state of the hinges and the state of the hydraulic cylinders.
This can be done using some kind of mapping function based on trigonometry.
TriP embraces this mapping approach and implements it using the KinematicGroup class.
A KinematicGroup is made up of a virtual_chain, an actuated_state, and two mappings.
The mappings convert between the state of the virtual_chain, called virtual_state, and the state of the actuated joints called actuated_state.

Important
The virtual_chain has to be a single open chain without branches. The reasons for this will be discussed in the next section
divide a robot into groups
In the example above the excavator is modeled as a single group. However, it is also possible to divide the excavator into multiple groups. These groups can then be combined just like transformations. Multiple smaller groups have two advantages over a single large group:
For one it improves modularity, making it easier to reuse assembly parts.
But more importantly, it reduced computational cost. To keep virtual and actuated state consistent mapping has to be called every time part of one state changes. A single group mechanism would mean updating every state. This problem is especially bad for branching mechanisms. Consider a four-legged robot, setting the actuator of one leg would then mean updating all four legs. To prevent this problem outright the virtual chain can not contain branches.
In summary, groups should be defined as small as possible. Small in this case refers to the number of actuators that have to be grouped. The minimum size is defined by the closed chains. Consider the following mechanism

Grouping a) and c) are valid groups, with a) being more performant. However the Grouping in b) is not valid. The reason is that the state of the top platform depends on the state of all three green prismatic joints.
These considerations lead to the following guidelines for building hybrid robots:
Important
Every closed chain should be modeled by a Group. Every open chain should be modeled by Transformations. Se the following robots as an example:

The excavator has two actuated states and two virtual states. These are the lengths of hydraulic cylinders \(a_1\), \(a_2\) and the arm angles \(q_1\), \(q_2\). Since each cylinder length \(a_i\) controls one arm angle \(q_i\), the excavator can be divided into two groups. These are visualized by the green and blue parts respectively.
The mappings for each group can be calculated using trigonometry:

The full code for the excavator looks like this:
1from typing import Dict
2from math import radians
3import casadi
4import numpy as np
5
6from trip_kinematics.Utility import hom_rotation, get_translation
7from trip_kinematics.Utility import hom_translation_matrix, y_axis_rotation_matrix
8from trip_kinematics.KinematicGroup import KinematicGroup
9from trip_kinematics.Transformation import Transformation
10from trip_kinematics.Robot import Robot
11
12
13l_1 = 1
14l_2 = 0.7
15l_3 = 1.2
16l_4 = 0.4
17l_5 = 1.7
18
19# zero conventions for the actuated joints
20a_1_offset = 0
21a_2_offset = 0
22
23virtual_joint_1 = Transformation(name="q_1",
24 values={'ry': 0},
25 state_variables=['ry'])
26link_1 = Transformation(name="link_1",
27 values={'tx': l_1+l_3+0.4},
28 parent=virtual_joint_1)
29virtual_joint_2 = Transformation(name="q_2",
30 values={'ry': radians(-90)},
31 state_variables=['ry'])
32link_2 = Transformation(name="link_2",
33 values={'tx': l_5},
34 parent=virtual_joint_2)
35
36
37################################################
38# Direct mappings using geometric calculations #
39################################################
40
41def geometric_q_to_a_group_1(state: Dict[str, float], tips: Dict[str, float] = None):
42 # convert joint angle to triangle angle
43 q_1 = radians(90) - state['q_1']['ry']
44 return {'a_1': np.sqrt(l_1**2+l_2**2-2*l_1*l_2*np.cos(q_1))}
45
46
47def geometric_a_to_q_group_1(state: Dict[str, float], tips: Dict[str, float] = None):
48 a_1 = state['a_1'] + a_1_offset
49 return {'q_1': {'ry': np.arccos((l_1**2+l_2**2-a_1**2)/(2*l_1*l_2))}}
50
51
52def geometric_q_to_a_group_2(state: Dict[str, float], tips: Dict[str, float] = None):
53 q_2 = -1 * state['q_2']['ry'] # convert joint angle to triangle angle
54 return {'a_2': np.sqrt(l_3**2+l_4**2-2*l_3*l_4*np.cos(q_2))}
55
56
57def geometric_a_to_q_group_2(state: Dict[str, float], tips: Dict[str, float] = None):
58 a_2 = state['a_2'] + a_2_offset
59 return {'q_2': {'ry': np.arccos((l_3**2+l_4**2-a_2**2)/(2*l_3*l_4))}}
60
61
62geometric_group_1 = KinematicGroup(name="geometric group 1",
63 virtual_chain=[virtual_joint_1, link_1],
64 actuated_state={'a_1': 0},
65 actuated_to_virtual=geometric_a_to_q_group_1,
66 virtual_to_actuated=geometric_q_to_a_group_1)
67
68geometric_group_2 = KinematicGroup(name="geometric group 2",
69 virtual_chain=[virtual_joint_2, link_2],
70 actuated_state={'a_2': 0},
71 actuated_to_virtual=geometric_a_to_q_group_2,
72 virtual_to_actuated=geometric_q_to_a_group_2,
73 parent=geometric_group_1)
74
75geometric_excavator = Robot([geometric_group_1, geometric_group_2])
actuated state vs virtual state
If one looks at the code above one can see that the dictionary values of the actuated state in lines 26 and 36 are float values, while the values of the virtual states in lines 32 and 39 are dictionaries.
This difference is because virtual states always specify convention parameters of a Transformation.
Actuated values on the other hand are not associated with a Transformation and thus don’t adhere to transformation conventions.
This is an important difference to keep in mind when dealing with both states. Below are a few examples of joints and how their actuated and virtual states would differ.


Using closure equations
While direct mappings are always preferable it is not always possible to find a direct function. In this case, one can always resort to the closure equation. Since TriP is based on mappings the closure equation is used to set up mapping functions that solve the closure equation. For the mapping from actuated state to virtual state, the actuated states are fixed and the virtual states calculated. Likewise, for the reverse mapping, the virtual state is fixed while the actuated states are calculated.
The setup of the closure equation will require extra transformations. This can be done by building a full open chain or for simple chains by directly setting up the transformation matrices using the Utility submodule. In this case of the excavator, the following joints can be defined:

The solving of the closure equation can be performed by casadi, which TriP also uses for inverse kinematics calculations:
1from typing import Dict
2from math import radians
3import casadi
4import numpy as np
5
6from trip_kinematics.Utility import hom_rotation, get_translation
7from trip_kinematics.Utility import hom_translation_matrix, y_axis_rotation_matrix
8from trip_kinematics.KinematicGroup import KinematicGroup
9from trip_kinematics.Transformation import Transformation
10from trip_kinematics.Robot import Robot
11
12
13l_1 = 1
14l_2 = 0.7
15l_3 = 1.2
16l_4 = 0.4
17l_5 = 1.7
18
19# zero conventions for the actuated joints
20a_1_offset = 0
21a_2_offset = 0
22
23virtual_joint_1 = Transformation(name="q_1",
24 values={'ry': 0},
25 state_variables=['ry'])
26link_1 = Transformation(name="link_1",
27 values={'tx': l_1+l_3+0.4},
28 parent=virtual_joint_1)
29virtual_joint_2 = Transformation(name="q_2",
30 values={'ry': radians(-90)},
31 state_variables=['ry'])
32link_2 = Transformation(name="link_2",
33 values={'tx': l_5},
34 parent=virtual_joint_2)
35
36
37###################################################################
38# mappings using colsure equation solution geometric calculations #
39###################################################################
40opts = {'ipopt.print_level': 0, 'print_time': 0}
41
42closure_1_state = casadi.SX.sym('cls_1_q', 3)
43
44cls_q_1 = hom_rotation(y_axis_rotation_matrix(closure_1_state[0]))
45cls_l_1 = hom_translation_matrix(t_x=l_1)
46cls_qs_2 = hom_rotation(y_axis_rotation_matrix(closure_1_state[1]))
47cls_a_1 = hom_translation_matrix(t_x=closure_1_state[2])
48cls_a_1z = hom_translation_matrix(t_x=a_1_offset)
49cls_1_trafo = cls_q_1 * cls_l_1 * cls_qs_2 * cls_a_1 * cls_a_1z
50
51cls_1_trafo_pos = get_translation(cls_1_trafo)
52
53c_1 = (cls_1_trafo_pos[0]-l_2)**2 + \
54 cls_1_trafo_pos[1]**2 + cls_1_trafo_pos[2]**2
55
56
57def closure_q_to_a_group_1(state: Dict[str, float]):
58 nlp = {'x': closure_1_state[1:], 'f': c_1, 'p': closure_1_state[0]}
59 nlp_solver = casadi.nlpsol('q_to_a', 'ipopt', nlp, opts)
60 solution = nlp_solver(x0=[0, 0], p=[state['q_1']['ry']])
61 sol_vector = np.array(solution['x'])
62 return {'a_1': sol_vector[1]}
63
64
65def closure_a_to_q_group_1(state: Dict[str, float]):
66 nlp = {'x': closure_1_state[:1], 'f': c_1, 'p': closure_1_state[2]}
67 nlp_solver = casadi.nlpsol('a_to_q', 'ipopt', nlp, opts)
68 solution = nlp_solver(x0=[0, 0], p=[state['a_1']])
69 sol_vector = np.array(solution['x'])
70 return {'q_1': {'ry': sol_vector[0]}}
71
72
73closure_2_state = casadi.SX.sym('cls_2_q', 3)
74
75cls_q_2 = hom_rotation(y_axis_rotation_matrix(closure_2_state[0]))
76cls_l_4 = hom_translation_matrix(t_x=l_4)
77cls_qs_4 = hom_rotation(y_axis_rotation_matrix(closure_2_state[1]))
78cls_a_2 = hom_translation_matrix(t_x=closure_2_state[2])
79cls_a_2z = hom_translation_matrix(t_x=a_1_offset)
80cls_2_trafo = cls_q_2 * cls_l_4 * cls_qs_4 * cls_a_2 * cls_a_2z
81
82cls_2_trafo_pos = get_translation(cls_1_trafo)
83
84c_2 = (cls_2_trafo_pos[0]+l_3)**2 + \
85 cls_2_trafo_pos[1]**2 + cls_2_trafo_pos[2]**2
86
87
88def closure_q_to_a_group_1(state: Dict[str, float]):
89 nlp = {'x': closure_2_state[1:], 'f': c_2, 'p': closure_2_state[0]}
90 nlp_solver = casadi.nlpsol('q_to_a', 'ipopt', nlp, opts)
91 solution = nlp_solver(x0=[0, 0], p=[state['q_1']['ry']])
92 sol_vector = np.array(solution['x'])
93 return {'a_2': sol_vector[1]}
94
95
96def closure_a_to_q_group_1(state: Dict[str, float]):
97 nlp = {'x': closure_2_state[:1], 'f': c_2, 'p': closure_2_state[2]}
98 nlp_solver = casadi.nlpsol('a_to_q', 'ipopt', nlp, opts)
99 solution = nlp_solver(x0=[0, 0], p=[state['a_1']])
100 sol_vector = np.array(solution['x'])
101 return {'q_2': {'ry': sol_vector[0]}}
102
Defining virtual chains
In the vast majority of cases, the specification of the virtual chain is straightforward. One simply uses a single chain of transformations that goes from one end of the group to the other. However, in some cases, this can lead to unintended or suboptimal results.
As a simple example of this problem, think of the excavator arm from above. Assuming that it had a spherical joint at the elbow, the system would still not be able to move any differently. However, the virtual open chain which neglects the hydraulic cylinders would suddenly behave much differently.
An inverse kinematics solver might now try to find open chain configurations that are not possible with the full mechanism.
Warning
Since TriP currently does not support Joint limits, it can not detect which open chain configurations are not possible. This can lead to solvers failing outright.
This problem can be avoided by designing a custom virtual open chain. In the case of the excavator this is very simple, just substitute the spherical joint with a revolute joint. For more complicated robots this might be more complex, a general rule of thumb is:
Important
The virtual open chain should offer the same degrees of freedom as the full mechanism. Ideally, the correspondence between virtual joints and actuated joints should be as simple as possible.
Robots
The Robot class is the centerpiece of TriP, they encapsulate Transormation and KinematicGroup objects of a Robot.
This causes some problems.
Groups distinguish between actuated_states and virtual_states while for a transformation these are the same.´
Important
To solve this problem Transformations are internally converted into groups.
The actuated state of a transformation follows the naming convention NAME_KEY
where NAME is the name of the Transformation and KEY is a key for the state of the transformation.
The full actuated state of a robot can be returned using the get_actuated_state method.
For robots without closed chains, both the virtual_state and the actuated_state can be used interchangeably. We advise nevertheless to use the actuated_state whenever possible as a general convention.
End Effectors
The Robot class offers the same functionality as the Group object at a more abstract level.
Additionally, it supports end effectors.
In robotics, an end effector is conventionally a device at the end of a robotics arm which interacts with the environment.
Kinematically and more, generally speaking, it is a coordinate frame whose position and orientation is of special interest.
This might be because it holds a tool, or because it specifies a foot position or maybe it just holds a sensor.
In any case, end effectors are coordinate frames for which we might want to compute forward or inverse kinematics. Since for open chains frames and the transformations leading to them are synonymous an effectors can be any frame resulting from a transformation of a robots virtual_chain. Remember since the robot is comprised of groups it’s virtual open chain is a concatenation of the virtual_chains of each group.
The Robot class offers the get_endeffectors method for ease of use which returns the names of all possible end effector frames.
Symbolic Representations
The robot class is capable of generating symbolic representations of end effector kinematics. This means it can describe the state of and end effector frame as a mathematical function \(\tilde{p}(\tilde{q})\) whose input is the virtual state \(\tilde{q}\).
This is handy for several reasons:
It allows for quick calculations of the end effector position without needing matrix multiplication at every step
It allows automatic mathematical derivation to calculate the Jacobi matrix and generally analyze the virtual chain
It allows the setup of mathematical solvers which can compute the inverse kinematics for a given end effector.
Generally, the first point is not needed as the forward kinematics is quite fast on its own and can be called using the forward_kinematic function given an end effector and a robot object. However, if speed is the issue, the casadi library which is used for the symbolic representation is capable of generating C code from such a function object. This can be used to further speed up code executions or calculate the kinematics on an embedded device.
The main advantages, however, are the second and the third points which are related seeing that most numerical optimization requires the computation of gradients. Casadi features fast algorithmic differentiation (a powerful hybrid between numerical differentiation and analytic differentiation used in many machine learning solutions). This allows the fast calculations of gradients and Jacobi matrices.
As such TriP can also be used to do kinematic analysis for open chains. Note that it does not support closed chains because the mapping functions don’t have to be casadi objects. However if one does use casadi like functions TriP can also be used to analyze hybrid chains.
In general, the symbolic representation returns a casadi object on which the full`casadi feature pallet can be used. This includes the setup of numerical solvers which are used to calculate the inverse kinematics.
Forward kinematics
The calculation of forward kinematics is done using the forward_kinematic function. The general procedure can be seen in the image below:

The forward kinematics of the virtual_chain are in this case calculated by multiypling the transformation matrices of the virtual_chain together. This results in a 4x4 transformation matrix describing the state of the end effector.
Solvers
Solvers are objects which calculate the inverse kinematics for a given Robot and end effector.
The reason they are not functions like the forward_kinematic functions is that the generation and setup of a casadi solver object is the biggest performance bottleneck.
To circumvent this, solver classes generate and store casadi solver objects for a given robot and end effector.
Using casadis framework it is then easily possible to implement different types of solving algorithms.
TriP currently only has one type of solver object called SimpleInvKinSolver which will be further explained shortly.
However it is also possible to write your own solver classes, all one has to do is implement the solve_virtual and solve_actuated
functions which return the virtual and actuated state respectively given a desired end effector state and an optional initial solver tip.
SimpleInvKinSolver
The SimpleInvKinSolver is as the name implies a rudimentary solver whose general procedure can be seen in the image below:

First, the system tries to find a virtual state which results in the end effector being as close as possible to the target. This is done using a casadis NLP solver using auto-generated jacobian and hessian matrices.
In the next step, the system calls the internal mapping functions of the robot to convert the virtual_state into an actuated_state.
Warning
This sequential approach is not capable of handling virtual_states for which no actuate_state can be found. In this case, the solver simply fails. To prevent this, suitable starting values for the solver can be supplied and the virtual_chain can be set up to minimize the chance of this happening. See section Defining virtual chains for reference.
Getting Started
The current release of the project can always be found on the python package index PyPi . However, since another python package is already called trip, the package is called trip_kinematics. The current stable release can be installed using:
pip install trip_kinematics
Alternatively, the current development version can be downloaded using Github:
git clone https://github.com/TriPed-Robot/TriP
cd TriP
pip install src/
For more information on how to use the library once installed visit the Tutorials or read ‘How TriP models Robots’.
Tutorials
Building a Robot Model
Before TriPs functionality can be used on a robot, it first has to be build within TriP. This Tutorial will show how to build the TriPed robot shown below:
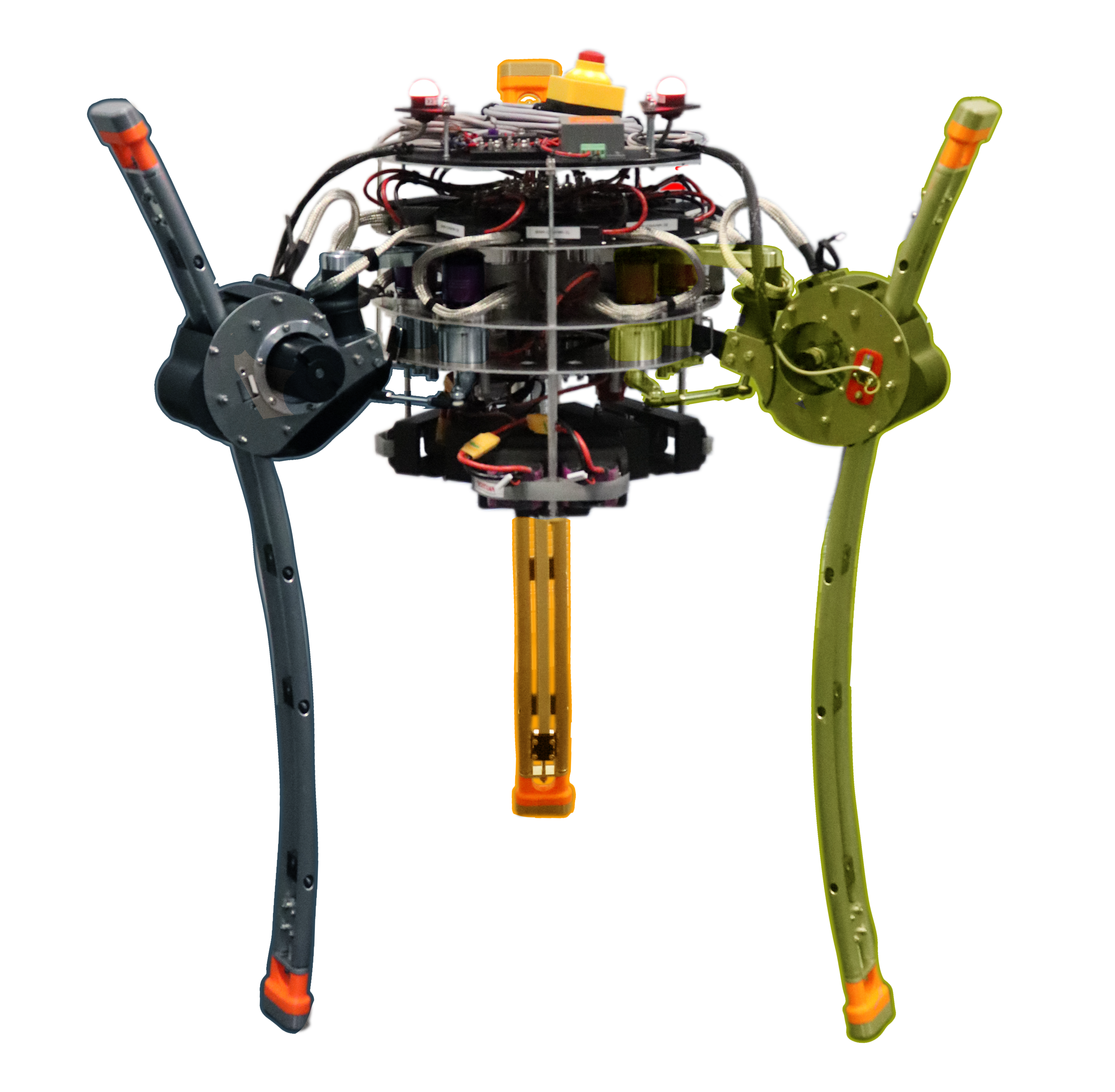
Here each leg was highlighted in a different color. Since all legs are identicall, this tutorial will start with a single leg. More information about the triped legs can be found here .
The first step in setting up a robot is identifying the groups and transformations. TriP uses Groups to model closed kinematic chains. These are structures where multiple moving parts converge in a single location forming one or more loops. Some examples can be seen down below:
These closed chains will either be connected directly to each other or using a series of other moving parts. Such a series is called a open kinematic chain. Open Kinematic chains are handled using a series of transformations.
In the case of the TriPed the following chains can be identified:

This in turn means that the leg of the TriPed contains one kinematic group and a number of transformations representing the open chain.
Once each group has been identified the group construction worklow goes like this:

Building open chains
Groups handle closed chains by abstracting them into a virtual open chains that models how group moves combined with two mapping functions from these virtual joints to the actual actuated joints and back. This means that for both the open and the closed chain, a chain has to be build. The precise transformations depend on the type of robot and its conventions. The kinematic transformations of the TriPed are described here: here . This leads to the following virtual open chain:
1from math import radians
2from typing import Dict
3from casadi import SX, nlpsol, vertcat
4import numpy as np
5
6
7from trip_kinematics.KinematicGroup import KinematicGroup
8from trip_kinematics.Transformation import Transformation
9from trip_kinematics.Robot import Robot
10from trip_kinematics.Utility import hom_translation_matrix, x_axis_rotation_matrix
11from trip_kinematics.Utility import y_axis_rotation_matrix, z_axis_rotation_matrix
12from trip_kinematics.Utility import hom_rotation, get_translation
13a_ccs_p_trans = Transformation(name='A_ccs_P_trans',
14 values={'tx': 0.265, 'tz': 0.014})
15a_ccs_p_rot = Transformation(name='gimbal_joint',
16 values={'rx': 0, 'ry': 0, 'rz': 0},
17 state_variables=['rx', 'ry', 'rz'],
18 parent=a_ccs_p_trans)
And the corresponding transformations for the open chain:
1a_p_ll = Transformation(name='A_P_LL',
2 values={'tx': 1.640, 'tz': -0.037, },
3 parent=closed_chain)
4a_ll_zero = Transformation(name='zero_angle_convention',
5 values={'ry': radians(-3)},
6 parent=a_p_ll)
7a_ll_zero_ll_joint = Transformation(name='extend_joint',
8 values={'ry': 0},
9 state_variables=['ry'],
10 parent=a_ll_zero)
11a_ll_joint_fcs = Transformation(name='A_LL_Joint_FCS',
12 values={'tx': -1.5},
13 parent=a_ll_zero_ll_joint)
Warning
Note that the second code block references the closed chain as its parent. Since this group is not yet build the code above will encounter errors. In Practice the close chain group first has to be built. The correct order of this code can be seen [here](https://github.com/TriPed-Robot/trip_kinematics/blob/main/src/trip_robots/triped_leg.py).
Note that both chains are made up of transformations without state_variables. Such transformations are ‘static’ and dont represent a joint. It is possible to construct open chains without such transformations (see the denavit hartenberg convention for example). In practice however they are handy to specify the position of a joint at a specified angle. This allows the joint angles to be interpretable. This can be seen with the a_ll_zero transformation. It ensures that a extend_joint angle corresponds to the foot of the leg being completely retracted.
Create Mappings
For the kinematic group a mapping from the actuated swing_joints to the virtual gimbal joint have to be provided. These joints can be seen down below:

The mapping between these joints can be computet by solving a geometric closing equation. As pictured above, the tip \(x_i\) the output lever connected to the actuated joints \(i\) alwas intersects the sphere at position \(c_i\) where \(i\) is either 1 or 2.
Mathematically this can be described using:
Where \(rx,ry,rz\) are the rotation around the x, y and z axis and the suberscript :math:`v,~a`denotes the virtual and actuated state respectively.
The virtual_to_actuated and actuated_to_virtual mappings can now be defined as the virtual or actuated state that solves the closure equation assuming the other state as a fixed value. This can be done using casadis nonelinear programming solver. The final code can be seen down below:
1def sphere_centers(r_x, r_y, r_z):
2 """Generates the centers of the spheres used for the geometric closure equation
3
4 Args:
5 r_x (float): gimbal joint state rx
6 r_y (float): gimbal joint state ry
7 r_z (float): gimbal joint state rz
8
9 Returns:
10 numpy array, numpy array: Two 3D arrays containing the sphere centers
11 """
12 a_ccs_p_trans_m = hom_translation_matrix(
13 t_x=0.265, t_y=0, t_z=0.014)
14 a_ccs_p_rot_m = hom_rotation(x_axis_rotation_matrix(r_x) @
15 y_axis_rotation_matrix(r_y) @
16 z_axis_rotation_matrix(r_z))
17 a_p_sph_1_2 = hom_translation_matrix(
18 t_x=0.015, t_y=0.029, t_z=-0.0965)
19 a_p_sph_2_2 = hom_translation_matrix(
20 t_x=0.015, t_y=-0.029, t_z=-0.0965)
21
22 a_ccs_ = a_ccs_p_trans_m @ a_ccs_p_rot_m
23 a_c1 = a_ccs_ @ a_p_sph_1_2
24 a_c2 = a_ccs_ @ a_p_sph_2_2
25
26 return get_translation(a_c1), get_translation(a_c2)
27
28
29def intersection_left(theta):
30 """calculates the desired sphere intersection point based on the left swing joint
31
32 Args:
33 theta (float): angle of the left swing joint
34
35 Returns:
36 numpy array: the sphere intersection
37 """
38 a_ccs_lsm_trans = hom_translation_matrix(
39 t_x=0.139807669447128, t_y=0.0549998406976098, t_z=-0.051)
40 a_ccs_lsm_rot = hom_rotation(z_axis_rotation_matrix(radians(-345.0)))
41 a_mcs_1_joint = hom_rotation(z_axis_rotation_matrix(theta))
42 a_mcs_1_sp_1_1 = hom_translation_matrix(
43 t_x=0.085, t_y=0, t_z=-0.0245)
44
45 a_ccs_sp_1_1 = a_ccs_lsm_trans @ a_ccs_lsm_rot @ a_mcs_1_joint @ a_mcs_1_sp_1_1
46 return get_translation(a_ccs_sp_1_1)
47
48
49def intersection_right(theta):
50 """calculates the desired sphere intersection point based on the right swing joint
51
52 Args:
53 theta (float): angle of the right swing joint
54
55 Returns:
56 numpy array: the sphere intersection
57 """
58 a_ccs_rsm_tran = hom_translation_matrix(
59 t_x=0.139807669447128, t_y=-0.0549998406976098, t_z=-0.051)
60 a_ccs_rsm_rot = hom_rotation(z_axis_rotation_matrix(radians(-15.0)))
61 a_mcs_2_joint = hom_rotation(z_axis_rotation_matrix(theta))
62 a_mcs_2_sp_2_1 = hom_translation_matrix(
63 t_x=0.085, t_y=0, t_z=-0.0245)
64
65 a_ccs_sp_2_1 = a_ccs_rsm_tran @ a_ccs_rsm_rot @ a_mcs_2_joint @ a_mcs_2_sp_2_1
66 return get_translation(a_ccs_sp_2_1)
67
68
69def swing_to_gimbal(state: Dict[str, float], tips: Dict[str, float] = None):
70 """Actuated to virtual state mapping for the TriPed legss closed subchain
71
72 Args:
73 state (Dict[str, float]): actuated state of the TriPed leg closed subchain
74 tips (Dict[str, float], optional): Initial state for the closure equation solver.
75 Defaults to None in which case [0,0,0] is used.
76
77 Returns:
78 Dict[str, Dict[str, float]]: the correspdonding state of the virtual chain
79 """
80 x_0 = [0, 0, 0]
81 if tips:
82 x_0[2] = tips['rx']
83 x_0[3] = tips['ry']
84 x_0[4] = tips['rz']
85
86 nlp = {'x': virtual_state, 'f': closing_equation, 'p': actuated_state}
87 nlp_solver = nlpsol('swing_to_gimbal', 'ipopt', nlp, opts)
88 solution = nlp_solver(x0=x_0,
89 p=[state['swing_left'], state['swing_right']])
90 sol_vector = np.array(solution['x'])
91 return {'gimbal_joint': {'rx': sol_vector[0][0],
92 'ry': sol_vector[1][0],
93 'rz': sol_vector[2][0]}}
94
95
96def gimbal_to_swing(state: Dict[str, Dict[str, float]], tips: Dict[str, float] = None):
97 """Virtual to actuated state mapping for the TriPed legss closed subchain
98
99 Args:
100 state (Dict[str, Dict[str, float]]): virtual state of the TriPed leg closed subchain
101 tips (Dict[str, float], optional): Initial state for the closure equation solver.
102 Defaults to None in which case [0,0] is used.
103
104 Returns:
105 Dict[str, float]: the correspdonding actuated state
106 """
107 x_0 = [0, 0]
108 continuity = 0
109 if tips:
110 x_0[0] = tips['swing_left']
111 x_0[1] = tips['swing_right']
112 continuity = (x_0-actuated_state).T @ (x_0-actuated_state)
113
114 nlp = {'x': actuated_state, 'f': closing_equation+continuity, 'p': virtual_state,
115 'g': actuated_state[0]*actuated_state[1]}
116 nlp_solver = nlpsol('gimbal_to_swing', 'ipopt', nlp, opts)
117 solution = nlp_solver(x0=x_0,
118 p=[state['gimbal_joint']['rx'],
119 state['gimbal_joint']['ry'],
120 state['gimbal_joint']['rz']],
121 ubg=0)
122 sol_vector = np.array(solution['x'])
123 return {'swing_left': sol_vector[0][0], 'swing_right': sol_vector[1][0]}
124
125
126theta_left = SX.sym('theta_left')
127theta_right = SX.sym('theta_right')
128gimbal_x = SX.sym('gimbal_x')
129gimbal_y = SX.sym('gimbal_y')
130gimbal_z = SX.sym('gimbal_z')
131
132virtual_state = vertcat(gimbal_x, gimbal_y, gimbal_z)
133actuated_state = vertcat(theta_left, theta_right)
134
135opts = {'ipopt.print_level': 0, 'print_time': 0}
136RADIUS = 0.11
137c1, c2 = sphere_centers(r_x=gimbal_x, r_y=gimbal_y, r_z=gimbal_z)
138closing_equation = (((c1-intersection_left(theta_right)).T @ (c1-intersection_left(theta_right)) -
139 RADIUS**2)**2 +
140 ((c2-intersection_right(theta_left)).T @ (c2-intersection_right(theta_left)) -
141 RADIUS**2)**2)
Building the group
Using both the mappings and the virtual open chain, the group can be build:
1closed_chain = KinematicGroup(name='closed_chain',
2 virtual_chain=[a_ccs_p_trans, a_ccs_p_rot],
3 actuated_state={
4 'swing_left': 0, 'swing_right': 0},
5 actuated_to_virtual=swing_to_gimbal,
6 virtual_to_actuated=gimbal_to_swing)
Note that the closed chain specifies no parent since it is located directly at the robots base and the open chain specifies no mappings since these are autogenerated.
Combining groups to a robot
The last step is to combine the group and transformations into a robot object:
triped_leg = Robot([closed_chain,a_p_ll,a_ll_zero,a_ll_zero_ll_joint,a_ll_joint_fcs])
Building the complete robot
Since the TriPed has three legs, the above process has to be repeated three times. Each time the joints and actuated state need their own unique names.
Since this would be tedious to do by hand, a function can be written that returns the full transformation of a single leg. This functions then follows the above steps, only appending the initial kinematic group with a transformation to the start position of each leg.
This function can be seen here:
1def leg_model(leg_number: str):
2 """Helper function that constructs each TriPed leg as a list of Transformations.
3
4 Args:
5 leg_number (str): The leg number which determins the orientation.
6 Acceptable values [0,1,2]
7 """
8 def rename_swing_to_gimbal(swing: Dict[str, float], tips: Dict[str, float] = None):
9 swing = deepcopy(swing)
10 swing['swing_left'] = swing[leg_name+'swing_left']
11 swing['swing_right'] = swing[leg_name+'swing_right']
12 del swing[leg_name+'swing_left']
13 del swing[leg_name+'swing_right']
14
15 if tips is not None:
16 tips = deepcopy(tips)
17 tips['gimbal_joint'] = tips[leg_name+'gimbal_joint']
18 del tips[leg_name+'gimbal_joint']
19
20 gimbal = swing_to_gimbal(swing, tips)
21
22 gimbal[leg_name+'gimbal_joint'] = gimbal['gimbal_joint']
23 del gimbal['gimbal_joint']
24
25 return gimbal
26
27 def rename_gimbal_to_swing(gimbal: Dict[str, float], tips: Dict[str, float] = None):
28 gimbal = deepcopy(gimbal)
29 gimbal['gimbal_joint'] = gimbal[leg_name+'gimbal_joint']
30 del gimbal[leg_name+'gimbal_joint']
31
32 if tips is not None:
33 tips = deepcopy(tips)
34 tips['swing_left'] = tips[leg_name+'swing_left']
35 tips['swing_right'] = tips[leg_name+'swing_right']
36 del tips[leg_name+'swing_left']
37 del tips[leg_name+'swing_right']
38
39 swing = gimbal_to_swing(gimbal, tips)
40
41 swing[leg_name+'swing_left'] = swing['swing_left']
42 swing[leg_name+'swing_right'] = swing['swing_right']
43 del swing['swing_left']
44 del swing['swing_right']
45
46 return swing
47
48 leg_name = 'leg_'+str(leg_number)+'_'
49
50 leg_rotation = Transformation(name=leg_name+'leg_rotation',
51 values={'rz': -1*radians(120)*leg_number})
52 a_ccs_p_trans = Transformation(name=leg_name+'A_ccs_P_trans',
53 values={'tx': 0.265, 'tz': 0.014},
54 parent=leg_rotation)
55 a_ccs_p_rot = Transformation(name=leg_name+'gimbal_joint',
56 values={'rx': 0, 'ry': 0, 'rz': 0},
57 state_variables=['rx', 'ry', 'rz'],
58 parent=a_ccs_p_trans)
59
60 closed_chain = KinematicGroup(name=leg_name+'closed_chain',
61 virtual_chain=[leg_rotation,
62 a_ccs_p_trans, a_ccs_p_rot],
63 actuated_state={
64 leg_name+'swing_left': 0, leg_name+'swing_right': 0},
65 actuated_to_virtual=rename_swing_to_gimbal,
66 virtual_to_actuated=rename_gimbal_to_swing)
67
68 a_p_ll = Transformation(name=leg_name+'A_P_LL',
69 values={'tx': 1.640, 'tz': -0.037, },
70 parent=closed_chain)
71 a_ll_zero = Transformation(name=leg_name+'zero_angle_convention',
72 values={'ry': radians(-3)},
73 parent=a_p_ll)
74 a_ll_zero_ll_joint = Transformation(name=leg_name+'extend_joint',
75 values={'ry': 0},
76 state_variables=['ry'],
77 parent=a_ll_zero)
78 a_ll_joint_fcs = Transformation(name=leg_name+'A_LL_Joint_FCS',
79 values={'tx': -1.5},
80 parent=a_ll_zero_ll_joint)
81
82 return [closed_chain, a_ll_zero_ll_joint, a_ll_joint_fcs, a_p_ll, a_ll_zero]
The final TriPed robot can then be build using:
1triped = Robot(leg_model(0)+leg_model(1)+leg_model(2))
Importing URDF Files
The Universal Robot Description Format (URDF) is used to describe a variety of serial robot mechanisms. Trip includes a URDF parser that allows the importation of alist of transfomrations from a URDF file
It can be used directly after importing the TriP library by calling the function trip_kinematics.from_urdf with the path to the URDF file as the argument. Note that the function returns a list of Transformations, which you probably want to create a Robot from in most cases:
transformations_list = trip_kinematics.urdf_parser.from_urdf(urdf_path)
robot = Robot(transformations_list)
This means you can also add other Transformations manually on top of those specified in the URDF file, if required.
Also note that the parser includes defaults for certain values if the corresponding URDF tag is missing, specifically:
<origin> defaults to <origin xyz=”0 0 0” rpy=”0 0 0” />.
(The same also applies if only one of xyz and rpy is specified, with the omitted value defaulting to “0 0 0”)
<axis> defaults to <axis xyz=”0 0 1” />
Code Documentation
- class trip_kinematics.Utility.Rotation(quat)[source]
Represents a 3D rotation.
Can be initialized from quaternions, rotation matrices, or Euler angles, and can be represented as quaternions. Reimplements a (small) part of the scipy.spatial.transform.Rotation API and is meant to be used for converting between rotation representations to avoid depending on SciPy. This class is not meant to be instantiated directly using __init__; use the methods from_[representation] instead.
- as_quat(scalar_first=True)[source]
Represents the object as a quaternion.
- Parameters
scalar_first (bool, optional) – Represent the quaternion in scalar-first (w, x, y, z) or scalar-last (x, y, z, w) format. Defaults to True.
- Returns
Quaternion.
- Return type
np.array
- classmethod from_euler(seq, rpy, degrees=False)[source]
Creates a :py:class`Rotation` object from Euler angles.
- Parameters
seq (str) – Included for compatibility with the SciPy API. Required to be set to ‘xyz’.
rpy (np.array) – Euler angles.
degrees (bool, optional) – True for degrees and False for radians. Defaults to False.
- Returns
Rotation object.
- Return type
- classmethod from_matrix(matrix)[source]
Creates a :py:class`Rotation` object from a rotation matrix.
Uses a very similar algorithm to scipy.spatial.transform.Rotation.from_matrix(). See https://github.com/scipy/scipy/blob/22f66bbd83867459f1491abf01b860b5ef4e026e/ scipy/spatial/transform/_rotation.pyx
- Parameters
matrix (np.array) – Rotation matrix.
- Returns
Rotation object.
- Return type
- classmethod from_quat(xyzw, scalar_first=True)[source]
Creates a :py:class`Rotation` object from a quaternion.
- Parameters
xyzw (np.array) – Quaternion.
scalar_first (bool, optional) – Whether the quaternion is in scalar-first (w, x, y, z) or scalar-last (x, y, z, w) format. Defaults to True.
- Returns
Rotation object.
- Return type
- trip_kinematics.Utility.get_rotation(matrix)[source]
Returns the 3x3 rotation matrix of the :py:class`TransformationMatrix`
- Returns
The 3x3 rotation matrix
- Return type
numpy.array
- trip_kinematics.Utility.get_translation(matrix)[source]
Returns the translation of the :py:class`TransformationMatrix`
- Returns
The 3 dimensional translation
- Return type
numpy array
- trip_kinematics.Utility.hom_rotation(rotation_matrix)[source]
Converts a 3x3 rotation matrix into a 4x4 homogenous rotation mtrix
- Parameters
rotation_matrix (numpy.array) – A 3x3 rotation matrix
- Returns
A 4x4 homogenous rotation matrix
- Return type
numpy.array
- trip_kinematics.Utility.hom_translation_matrix(t_x=0, t_y=0, t_z=0)[source]
Returns a homogenous translation matrix
- Parameters
t_x (int, optional) – Translation along the x axis. Defaults to 0.
t_y (int, optional) – Translation along the y axis. Defaults to 0.
t_z (int, optional) – Translation along the z axis. Defaults to 0.
- Returns
A 4x4 homogenous translation matrix
- Return type
numpy.array
- trip_kinematics.Utility.identity_transformation()[source]
Returns a 4x4 identity matix
- Returns
a 4x4 identity matrix
- Return type
numpy.array
- trip_kinematics.Utility.quat_rotation_matrix(q_w, q_x, q_y, q_z) <Mock name='mock.array' id='139654843560400'>[source]
Generates a 3x3 rotation matrix from q quaternion
- Parameters
q_w (float) – part of a quaternion [q_w,q_x,q_y,q_z]
q_x (float) – part of a quaternion [q_w,q_x,q_y,q_z]
q_y (float) – part of a quaternion [q_w,q_x,q_y,q_z]
q_z (float) – part of a quaternion [q_w,q_x,q_y,q_z]
- Returns
A 3x3 rotation matrix
- Return type
numpy.array
- trip_kinematics.Utility.x_axis_rotation_matrix(theta)[source]
Generates a matrix rotating around the x axis
- Parameters
theta (float) – The angle of rotation in rad
- Returns
A 3x3 rotation matrix
- Return type
numpy.array
- trip_kinematics.Utility.y_axis_rotation_matrix(theta)[source]
Generates a matrix rotating around the y axis
- Parameters
theta (float) – The angle of rotation in rad
- Returns
A 3x3 rotation matrix
- Return type
numpy.array
- trip_kinematics.Utility.z_axis_rotation_matrix(theta)[source]
Generates a matrix rotating around the z axis
- Parameters
theta (float) – The angle of rotation in rad
- Returns
A 3x3 rotation matrix
- Return type
numpy.array
- class trip_kinematics.Transformation.Transformation(name: str, values: Dict[str, float], state_variables: Optional[List[str]] = None, parent=None)[source]
Initializes the
Transformationclass.- Parameters
name (str) – The unique name identifying the Transformation. No two
Transformationobjects of a :py:class`Robot` should have the same namevalues (Dict[str, float]) – A parametric description of the transformation.
state_variables (List[str], optional) – This list describes which state variables are dynamically changable. This is the case if the
Transformationrepresents a joint. Defaults to [].
- Raises
ValueError – A dynamic state was declared that does not correspond to a parameter declared in
values.
- add_children(child: str)[source]
- Adds the name of a
KinematicGrouporTransformation as a child.
- Parameters
child (str) – the name of a
KinematicGrouporTransformation
- Adds the name of a
- static get_convention(state: Dict[str, float])[source]
- Returns the connvention which describes how the matrix
of a
Transformationis build from its state.
- Parameters
state (Dict[str, float]) – :py:attr:’state’
- Raises
ValueError – “Invalid key.” If the dictionary kontains keys that dont correspond to a parameter of the transformation.
ValueError – “State can’t have euler angles and quaternions!” If the dictionary contains keys correspondig to multiple mutually exclusive conventions.
- Returns
A string describing the convention
- Return type
[type]
- get_name()[source]
Returns the
_nameof theTransformation- Returns
a copy the
_nameattribute- Return type
str
- get_state()[source]
- Returns a copy of the
_state attribute of the
Transformationobject.
- Returns
a copy of the
_state- Return type
Dict[str,float]
- Returns a copy of the
- get_transformation_matrix()[source]
- Returns a homogeneous transformation matrix build
from the
stateandconstants
- Raises
RuntimeError – If the convention used in
stateis not supported. Should normally be catched during initialization.- Returns
- A transformation matrix build using the parameters
of the
Transformationstate
- Return type
[type]
- set_state(state: Dict[str, float])[source]
Sets the state of the
Transformationobject.- Parameters
state (Dict[str, float]) – Dictionary with states that should be set. Does not have to be the full state.
- Raises
KeyError – If a key in the argument is not valid state parameter name.
- trip_kinematics.Transformation.array_find(arr, obj) int[source]
- A helpher function which finds the index of an object in an array.
Instead of throwing an error when no index can be found it returns -1.
- Parameters
arr – the array to be searched
obj – the object whose index is to be found.
- Returns
The index of obj in the array. -1 if the object is not in the array
- Return type
int
- class trip_kinematics.KinematicGroup.KinematicGroup(name: str, virtual_chain: List[trip_kinematics.Transformation.Transformation], actuated_state: Dict[str, float], actuated_to_virtual: Callable, virtual_to_actuated: Callable, act_to_virt_args=None, virt_to_act_args=None, parent=None)[source]
Initializes a
KinematicGroupobject.- Parameters
name (str) – The unique name identifying the group. No two
KinematicGroupobjects of a :py:class`Robot` should have the same namevirtual_chain (List[Transformation]) – A list of
Transformationobjects forming a serial Kinematic chain.actuated_state (List[Dict[str, float]]) – The State of the Groups actuated joints.
actuated_to_virtual (Callable) – Maps the
actuated_stateto thevirtual_stateof thevirtual_chain.virtual_to_actuated (Callable) – Maps the
virtual_stateof thevirtual_chainto theactuated_state.act_to_virt_args ([type], optional) – Arguments that can be passed to
actuated_to_virtualduring the initial testing of the function. Defaults to None.virt_to_act_args ([type], optional) – Arguments that can be passed to
virtual_to_actuatedduring the initial testing of the function. Defaults to None.parent (Union(Transformation,KinematicGroup), optional) – The transformation or group preceding the
KinematicGroup. Defaults to None.
- Raises
ValueError – ‘Error: Actuated state is missing. You provided a mapping to actuate the group but no state to be actuated.’ if there is no
actuated_statedespite a mapping being passedValueError – ‘Error: Only one mapping provided. You need mappings for both ways. Consider to pass a trivial mapping.’ if either
actuated_to_virtualorvirtual_to_actuatedwas not set despite providing aactuated_state.ValueError – ‘Error: Mappings missing. You provided an actuated state but no mappings. If you want a trivial mapping you don’t need to pass an actuated state. Trip will generate one for you.’ if both
actuated_to_virtualandvirtual_to_actuatedwere not set despite providing aactuated_state.RuntimeError – “actuated_to_virtual does not fit virtual state” if the
actuated_to_virtualfunction does not return a validvirtual_statedictionary.RuntimeError – “virtual_to_actuated does not fit actuated state” if the
virtual_to_actuatedfunction does not return a validactuated_statedictionary.
- add_children(child: str)[source]
- Adds the name of a
KinematicGrouporTransformation as a child.
- Parameters
child (str) – the name of a
KinematicGrouporTransformation
- Adds the name of a
- get_actuated_state()[source]
- Returns a copy of the
actuated_state attribute of the
KinematicGroupobject.
- Returns
a copy of the
actuated_state- Return type
Dict[str,float]
- Returns a copy of the
- get_name()[source]
Returns the
_nameof theKinematicGroup- Returns
the
_nameattribute- Return type
str
- get_transformation_matrix()[source]
- Calculates the full transformationmatrix from
the start of the virtual chain to its endeffector.
- Returns
- The homogenous transformation matrix from
the start of the virtual chain to its endeffector.
- Return type
array
- get_virtual_chain()[source]
- Returns a copy of the
_virtual_chain attribute of a
KinematicGroupobject.
- Returns
a copy of the
_virtual_chain- Return type
Dict[str,Transformation]
- Returns a copy of the
- get_virtual_state()[source]
- Returns a copy of the
virtual_state attribute of the
KinematicGroupobject.
- Returns
a copy of the
virtual_state- Return type
Dict[str,Dict[str,float]]
- Returns a copy of the
- static object_list_to_key_lists(object_lst)[source]
Helper function which transforms dictionary into list of keys.
- Parameters
object_lst (Dict) – The dictionary to be transformed
- Returns
A list of keys
- Return type
list(str)
- pass_arg_a_to_v(argv)[source]
Allows arguments to be passed the
actuated_to_virtualmapping.- Parameters
argv ([type]) – arguments to be passed.
- pass_arg_v_to_a(argv)[source]
Allows arguments to be passed the
virtual_to_actuatedmapping.- Parameters
argv ([type]) – arguments to be passed.
- set_actuated_state(state: Dict[str, float])[source]
- Sets the
actuated_stateof the Group and automatically updates the corresponding
virtual_state.
- Parameters
state (Dict[str, float]) – A dictionary containing the members of
actuated_statethat should be set.- Raises
RuntimeError – if all
Transformationobjects of_virtual_chainare static.ValueError – if the state to set is not part of keys of
actuated_state
- Sets the
- set_virtual_state(state: Dict[str, Dict[str, float]])[source]
- Sets the
virtual_stateof the Group and automatically updates the corresponding
actuated_state.
- Parameters
state (Dict[str,Dict[str, float]]) – A dictionary containing the members of
virtual_statethat should be set. The new values need to be valid state for the state of the joint.- Raises
RuntimeError – if all
Transformationobjects of_virtual_chainare static.ValueError – if the state to set is not part of keys of
virtual_state
- Sets the
- class trip_kinematics.KinematicGroup.OpenKinematicGroup(name: str, virtual_chain: List[trip_kinematics.Transformation.Transformation], parent=None)[source]
- A subclass of the
KinematicGroupthat assumes that all states of the virtual_chain are actuated and automatically generates mappings. Typically only used internally by the :py:class`Robot` class to convert :py:class`Transformation` objects to :py:class`KinematicGroup`s.
- Parameters
name (str) – The unique name identifying the group. No two
KinematicGroupobjects of a :py:class`Robot` should have the same namevirtual_chain (List[Transformation]) – A list of
Transformationobjects forming a serial Kinematic chain.parent (Union(Transformation,KinematicGroup), optional) – The transformation or group preceding the
KinematicGroup. Defaults to None.
- A subclass of the
- class trip_kinematics.Robot.Robot(kinematic_chain: List[trip_kinematics.KinematicGroup.KinematicGroup])[source]
A class representing the kinematic model of a robot.
- Parameters
kinematic_chain (List[KinematicGroup]) – A list of Kinematic Groups and Transformations which make up the robot. Transformations are automatically converted to groups
- Raises
KeyError – “More than one robot actuator has the same name! Please give each actuator a unique name” if there are actuated states with the same names between the :py:class`KinematicGroup` objects of the :py:class`Robot`
KeyError – if there are joints with the same names between the :py:class`KinematicGroup` objects of the :py:class`Robot`
- get_actuated_state()[source]
- Returns the actuated state of the :py:class`Robot` comprised
of the actuated states of the individual :py:class`KinematicGroup`.
- Returns
combined actuated state of all :py:class`KinematicGroup` objects.
- Return type
Dict[str, float]
- get_endeffectors()[source]
- Returns a list of possible endeffectors.
These are the names of all
KinematicGroupobjects. Since Transformations are internally converted to Groups, this includes the names of all Transformations.
- Returns
list of possible endeffectors.
- Return type
list(str)
- get_groups()[source]
- Returns a dictionary of the py:class`KinematicGroup` managed by the :py:class`Robot`_
Since Transformations are internally converted to Groups, this also returns all Transformations.
- Returns
The dictionary of py:class`KinematicGroup` objects.
- Return type
Dict[str, KinematicGroup]
- get_symbolic_rep(endeffector: str)[source]
This Function returnes a symbolic representation of the virtual chain.
- Parameters
endeffector (str) – The name of the group whose virtual chain models the desired endeffector
- Raises
KeyError – If the endeffector argument is not the name of a transformation or group
- Returns
A 4x4 symbolic casadi matrix containing the transformation from base to endeffector
- Return type
SX
- get_virtual_state()[source]
- Returns the virtual state of the :py:class`Robot` comprised
of the virtual states of the individual :py:class`KinematicGroup`.
- Returns
- combined virtual state of all
:py:class`KinematicGroup` objects.
- Return type
Dict[str,Dict[str, float]]
- pass_group_arg_a_to_v(argv_dict)[source]
- Passes optional actuated_to_virtual mapping arguments
to :py:class`KinematicGroup` objects of the robot.
- Parameters
argv_dict (Dict) – A dictionary containing the mapping arguments keyed with the :py:class`KinematicGroup` names.
- Raises
KeyError – If no group with the name given in the argument is part of the robot.
- pass_group_arg_v_to_a(argv_dict: Dict)[source]
- Passes optional virtual_to_actuated mapping arguments
to :py:class`KinematicGroup` objects of the robot.
- Parameters
argv_dict (Dict) – A dictionary containing the mapping arguments keyed with the :py:class`KinematicGroup` names.
- Raises
KeyError – If no group with the name given in the argument is part of the robot.
- set_actuated_state(state: Dict[str, float])[source]
Sets the virtual state of multiple actuated joints of the robot.
- Parameters
state (Dict[str, float]) – A dictionary containing the members of
__actuated_statethat should be set.
- set_virtual_state(state: Dict[str, Dict[str, float]])[source]
Sets the virtual state of multiple virtual joints of the robot.
- Parameters
state (Dict[str,Dict[str, float]]) –
- A dictionary containing the members of
__virtual_statethat should be set.
The new values need to be valid state for the state of the joint.
- trip_kinematics.Robot.forward_kinematics(robot: trip_kinematics.Robot.Robot, endeffector)[source]
Calculates a robots transformation from base to endeffector using its current state
- Parameters
robot (Robot) – The robot for which the forward kinematics should be computed
- Returns
The Transformation from base to endeffector
- Return type
numpy.array
- class trip_kinematics.Solver.CCDSolver(robot: trip_kinematics.Robot.Robot, endeffector: str, orientation=False, update_robot=False, options=None)[source]
- A Cyclical Coordinate Descent based Kinematic Solver Class that calculates
the inverse kinematics for a given endeffector.
- Parameters
robot (Robot) – The Robot for which the kinematics should be calculated
endeffector (str) – the name of the endeffector
orientation (bool, optional) – Boolean flag deciding if inverse kinematics targets also specify orientation. Defaults to False.
update_robot (bool, optional) – Boolean flag decding if the inverse kinematics should immediately update the robot model. Defaults to False.
options (Dict, optional) –
A dictionary containing options for the CCD solver. Possible keys: stepsize: the step length along the gradient max_iterations: the maximum number of iterations
before terminating
- precision: the minimum amount of joint value change
before terminating
- solve_actuated(target: <Mock name='mock.array' id='139654843560400'>, initial_tip=None, mapping_argument=None)[source]
Returns the actuated state needed for the endeffector to be in the target position :param target: The target state of the endeffector.
Either a 3 dimensional position or a 4x4 homogenous transformation
- Parameters
initial_tip (Dict[str,Dict[str, float]], optional) – Initial state of the solver. In this case refers to a virtual state. Defaults to None in which case zeros are used.
mapping_argument ([type], optional) – Optional arguments for the virtual_to_actuated mappings of the robot. Defaults to None.
- Returns
The actuated state leading the endeffector to the target position.
- Return type
Dict(str,float)
- solve_virtual(target: <Mock name='mock.array' id='139654843560400'>, initial_tip=None)[source]
Returns the virtual state needed for the endeffector to be in the target position :param target: The target state of the endeffector.
Either a 3 dimensional position or a 4x4 homogenous transformation
- Parameters
initial_tip ((Dict(str,Dict(str,float))), optional) – Initial state of the solver as a virtual state. Defaults to None in which case zeros are used.
- Returns
- The virtual state leading the endeffector
to the target position.
- Return type
Dict(str,Dict(str,float))
- class trip_kinematics.Solver.SimpleInvKinSolver(robot: trip_kinematics.Robot.Robot, endeffector: str, orientation=False, update_robot=False)[source]
- A Simple Kinematic Solver Class that calculates
the inverse kinematics for a given endeffector.
- Parameters
robot (Robot) – The Robot for which the kinematics should be calculated
endeffector (str) – the name of the endeffector
orientation (bool, optional) – Boolean flag deciding if inverse kinematics targets also specify orientation. Defaults to False.
update_robot (bool, optional) – Boolean flag decding if the inverse kinematics should immediately update the robot model. Defaults to False.
- solve_actuated(target: <Mock name='mock.array' id='139654843560400'>, initial_tip=None, mapping_argument=None)[source]
Returns the actuated state needed for the endeffector to be in the target position :param target: The target state of the endeffector.
Either a 3 dimensional position or a 4x4 homogenous transformation
- Parameters
initial_tip (Dict[str,Dict[str, float]], optional) – Initial state of the solver. In this case refers to a virtual state. Defaults to None in which case zeros are used.
mapping_argument ([type], optional) – Optional arguments for the virtual_to_actuated mappings of the robot. Defaults to None.
- Returns
The actuated state leading the endeffector to the target position.
- Return type
Dict(str,float)
- solve_virtual(target: <Mock name='mock.array' id='139654843560400'>, initial_tip=None)[source]
Returns the virtual state needed for the endeffector to be in the target position :param target: The target state of the endeffector.
Either a 3 dimensional position or a 4x4 homogenous transformation
- Parameters
initial_tip ((Dict(str,Dict(str,float))), optional) – Initial state of the solver as a virtual state. Defaults to None in which case zeros are used.
- Returns
- The virtual state leading the endeffector
to the target position.
- Return type
Dict(str,Dict(str,float))